早期的ADAS基本方案就是一个车头毫米波雷达+一个驾驶位挡风玻璃下的摄像头+车尾超声波雷达的配置。
这三种感知探测设备成本不高,技术成熟,而且可以实现L2级别的大多数功能,如自适应巡航,AEB,LKA,行人保护,交通标志识别,倒车辅助等。

而现在为了达到更好的智能辅助驾驶,是不能模拟人的狭小视角为基础的。感知的范围需要覆盖远中近距离,车辆周围的全部立体空间。
其中即便只用一种感知设备,比如特斯拉推崇的全摄像头自动驾驶模式,也必须要多个摄像头来探知不同角度的周围环境,包括能看到地面和天空,务必做到在任何驾驶中,都能杜绝盲区的出现。
而大部分车企走的智能驾驶的路,则是利用不同感知设备来取长补短,利用多种传感器来融合,在范围、精度、FOV、采样率、成本和一般系统复杂性之间做好平衡,所以激光雷达因为其精准性,也提上了主流车型装配的行程。
先简单介绍下毫米波雷达和激光雷达的差别。
一般毫米波雷达装在车辆的车头正前方,保险杠的下方。

毫米波雷达的工作原理就是通过发射无线电信号(毫米波段,30-300GHZ),再将反射的零散信号收回,来探测感知周围物体,通过算法(阈值去掉噪声值留下信号能量峰值)得到反射点的信息,再得到汽车和其他物体之间的相对距离、相对速度、角度、运动方向等。
毫米波的最大优点就是无视天气,穿透雾气、烟尘的能力强,受到环境因素影响较小,可以保障在日常情况下的使用。
举个实际中的例子,高速上起了大雾,能见度急速降低,但有的车主头铁,依然不减速(不提倡),结果车辆开始报警,AEB介入,车辆检测到前方雾气里有车辆行驶,两者间距迅速变少,系统开始自己踩刹车减速。

这就是毫米波雷达不受雾气干扰的应用场景。
同样的,无论是下雨,雾气,甚至是污染严重的尘埃天气或者是光照不足的夜晚,车载毫米波雷达都可以达到200米往上的探测,所受影响极少,全天候(白天/黑夜),恶劣天气下均能正常发挥作用,极大提高了辅助驾驶的安全性。
当然,恶劣天气,光照差的情况下,不提倡超车、频繁变道,急加速等危险驾驶,因为毫米波雷达虽然不受恶劣天气及光照影响,但本身也是有弊端的。

那就是毫米波雷达分辨率低,无法清晰辨别较小的物体,且对金属极为敏感。(一个不规则小块金属可能识别成一个大表面积的大块金属。)
假设10CM一个反射点,即便是77GHZ的毫米波雷达动态扫描到车前方的人体侧面,很有可能也就得到十几个点到二十几个点,实际对于系统来说也是很难判断的。
举一个经典的例子,就是道路上如果有人或者有车,识别率会很高。但是人和车重合,人走到了车后方,那么识别大概率会失败,因为从这稀疏的重合点来看,系统根本无法判断这是个啥玩意。而系统判断不出来,就会忽略掉。
如果要更清楚辨别较小物体,就要把毫米波雷达的探测阈值设低,但毫米波雷达又对金属敏感度太高,调低阈值噪点增多,这样的结果就是会有越来越多“鬼影”的出现,会出现众多的虚报物体。
所以毫米波雷达分辨常规在道路上出现的大型物体(前方车辆),同时抗天气干扰能力一流,但你指望这个精度几厘米级到几十厘米的雷达能够准确分清楚高速行驶车辆的前面是个啥玩意,肯定是不行的。因为它的一惊一乍,一路上动不动给你虚报,那么车都不用开了,就不停急刹着玩就好了。
为了保障毫米波雷达的正常使用,毫米波雷达就会对静态物体进行“杂波滤除”(因为在马路上行驶,静态物体太多了,金属物也多,路边的易拉罐,碎铁屑,随处可见的金属交通标识,限高龙门架都会造成干扰)。如果不设定无视这些检测到的静态“干扰物”,那么在路上,车辆就会变得寸步难行,不停地报警和刹车将会变成常态。
所以,毫米波雷达无法完成的,就得有激光雷达出马了。
激光雷达,靠发射激光束,然后接受到目标回波,与发射信号做出对比后,从而得知物体的相对位置和速度等数据。
激光雷达的优点就是分辨率高、精度高,对比10CM级别精度的毫米波雷达,激光雷达的精度可以轻松到毫米级别,可以轻描淡写给所有周边大小物体建立3D立体图形。
网络有个经典的点云图,就是描述的激光雷达的效果。
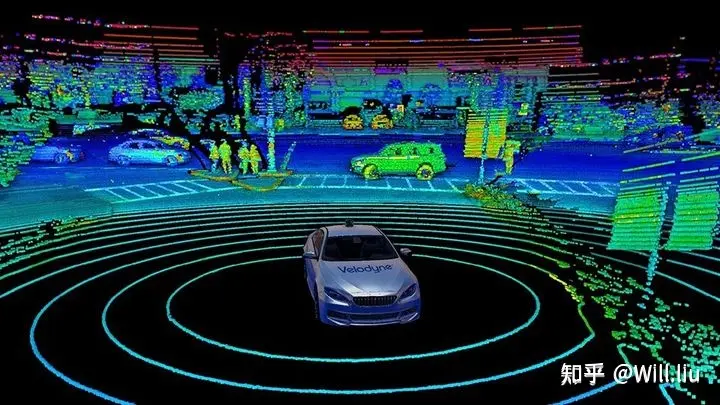
而激光雷达的角分辨率更是超过毫米波雷达数个等级,轻松可以达到0.1°,也就是说可以分辨3KM距离上的相距5M的两个目标。
可以设想下,原本毫米波雷达稀疏的点变成了密集的,人眼都可以看出来是啥玩意的扫描3D图,自然识别障碍物的精准度上来了。即便人走车后面,系统也不会懵(但也要进行仿真学习和训练相关场景)。
而且激光雷达比起毫米波雷达,能抗电子干扰。因为毫米波雷达发射的是无线电信号,在我们的周围,存在着大量各种无线电信号,所以有可能有同频段的电磁波会干扰毫米波雷达的判断。
但是激光雷达由于是光束,会受到空气中微粒的影响,所以雨雾霾尘里会急速衰减,传播距离大大受限。而且对比摄像头,激光雷达无法分辨平面图像,所以也无法分辨图形和颜色的含义。
而且还是因为是光束,所以也会受到折射面和阳光的影响,比如反光强烈的物体会造成激光雷达的误判,容易在点云中形成和现实物体完全不同的“虚影”、“重影”。
这也是为什么,我在开头所说的,实际每一种感知设备都有自己的优缺点。
毫米波雷达精度低,但是可以方便得到周围物体的相对速度和距离。摄像头可以获得平面图形,看懂交通标识和分辨颜色。激光雷达探测精度高,可以获得周围物体的三维图像。超声波雷达在短距离测距中有着极大的成本、能耗低的优势。
所以智能驾驶走向真正的自动驾驶,个人觉得还是需要多种感知设备来进行一个搭配和彼此融合,才能在范围、精度、FOV、采样率、成本和一般系统复杂性之间做好平衡,搭建一个完美的感知应对平台。
(图片来源网络,侵删!)
来源:知乎 www.zhihu.com
作者:Will.liu
【知乎日报】千万用户的选择,做朋友圈里的新鲜事分享大牛。
点击下载
此问题还有 115 个回答,查看全部。
延伸阅读:
车路协同中的毫米波雷达和激光雷达在应用上有什么区别?